Basic Ollama install – Linux
In my first install of Linux (Ubuntu 22.04) in Sept, 2025, I just installed Ollama for testing all of these gpu’s LLM performance. Working with Ollama looked easy. I’d not used any LLM software previously, so that’s what I did. After attempting to replicate my efforts present day, (Nov 2025) I couldn’t seem to get Ollama working with my Radeon 7 / Mi50 gpu’s. I finally realized it was due to the version that installs when you run the standard Ollama install:
curl -fsSL https://ollama.com/install.sh | sh
On my old Linux from Sept, I was running Ollama v0.12.3.
As of today, if you install Ollama from the curl command shown above, it installs v0.13.0.
In v0.12.3, the automatic installation of ROCm which accompanies Ollama includes their own gfx906 tensor files in /rocm/library that Ollama uses. In the more recent versions of Ollama, these gfx906 files have been omitted.
So if you desire to simply install Ollama and run it, without messing with separate installations of ROCm 7.x and AMDGPU, you can. Just go to the manual installation page for Ollama and scroll down to “install specific version” section and amend the command to pull v0.12.3. Run ‘ollama serve’ with ‘sudo’ and it’ll bypass systemd permissions. See YouTube video above, it goes live on 11/23/25 – 6am CST.
More advanced setup for gfx906 – – build llama.cpp
If you really want to squeeze every last drop of performance out of your Vega 20 cards (and who doesn’t?) you’ll want to build your own llama.cpp app. It’s really not too complicated. Here’s a basic outline.
- Visit AMD’s quick install guide here: Quick start installation guide — ROCm installation (Linux)
- Follow the steps to install both ROCm 7.x (in takes 20-30 minutes) and then Install AMDGPU. It’s simple cut / paste into terminal. But DON’T REBOOT yet like the site instructs you to !!
- Here are the ROCm rocblas libraries with gfx06 tensorfiles included. : https://repo.radeon.com/rocm/apt/5.7.3/pool/main/r/rocblas/
- Extract the .zip that downloads from amd, and ‘sudo cp’ all of the gfx906 tensor files in /opt/rocm/lib/rocblas/library over to your opt/rocm/lib/rocblas/library on your linux install.
- sudo cp /home/$USER/Downloads/rocblas-(version)_64.pkg/opt/rocm/lib/rocblas/library/*gfx906* /opt/rocm/lib/rocblas/library/
- Now reboot.
Build llama.cpp:
Assuming you have a fresh Ubuntu 24.04 (noble) installation, run this command to install prerequisites for building llama.cpp:
sudo apt update && sudo apt install -y \
git cmake curl build-essential ninja-build \
python3 python3-venv python3-pip \
rocm-dev rocm-libs rocm-hip-sdk rocblas \
libcurl4-openssl-devNext, visit GitHub – ggml-org/llama.cpp: LLM inference in C/C++
git clone https://github.com/ggml-org/llama.cpp
cd llama.cppThere is a “build source from repository by visiting our build guide” link down in the QuickStart section. Visit the HIP section of below Github page (it’s near the mid-bottom of page)
llama.cpp/docs/build.md at master · ggml-org/llama.cpp · GitHub
Run the command that they provide in the HIP section (but swap gfx1030 for gfx906 – or use whatever gfx#### matches your gpu architecture.) You can run “rocminfo” and view the various “Agent” line items that it shows in order to see the gfx architecture of your gpu.
Here is command for building llama.cpp with gfx906 gpu:
HIPCXX="$(hipconfig -l)/clang" HIP_PATH="$(hipconfig -R)" \
cmake -S . -B build -DGGML_HIP=ON -DGPU_TARGETS=gfx906 -DCMAKE_BUILD_TYPE=Release \
&& cmake --build build --config Release -- -j 16Let it build with CMake. Any prerequisites you’ll have to install first. Your system will tell you if you are missing any.
Don’t be afraid to use an online ai chat bot to get assistance. I find that they make the use of Terminal prompt extremely easy to navigate… copy / pasting most of my commands after having them put in correct syntax via the bot.
Once llama.cpp is built, you can run this command to make llama commands work from anywhere, else you have to be inside your llama.cpp/build/bin directory.
Create a symlink:
sudo ln -s ~/llama.cpp/build/bin/llama-cli /usr/local/bin/llama-cli
Then:
llama-cli --versionDownload Models
I highly recommend utilizing MoE (mixture of experts) style models. They aren’t as densely layered and ultimately perform WAY better than non-MoE models do on older Vega cards in general.
Here’s a sample command to download a model from huggingface:
(from the /home/$USER/llama.cpp/build/bin directory)
./llama-cli -hf ggml-org/gpt-oss-20b-GGUFOnce the model is downloaded, load the model into llama-server with: (change these parameters to your liking / need / gpu capacity)
ROCR_VISIBLE_DEVICES=0 (assuming rocm-smi shows your gpu as 0)./llama-cli -m /home/$USER/.cache/llama.cpp/ggml-org_gpt-oss-20b-GGUF_gpt-oss-20b-mxfp4.gguf \
-ngl -1 \
-c 5012 \
--n-predict 1024 \
-b 2048 \
--interactive-firstThat should be it!!! You can download whatever model in whatever quantization you prefer from a variety of sources.
Here’s a link to my benchmark script:
https://drive.google.com/file/d/1eXtBOATYKkchl96b7vS_ie3O4Lvdkyi3/view?usp=drive_link
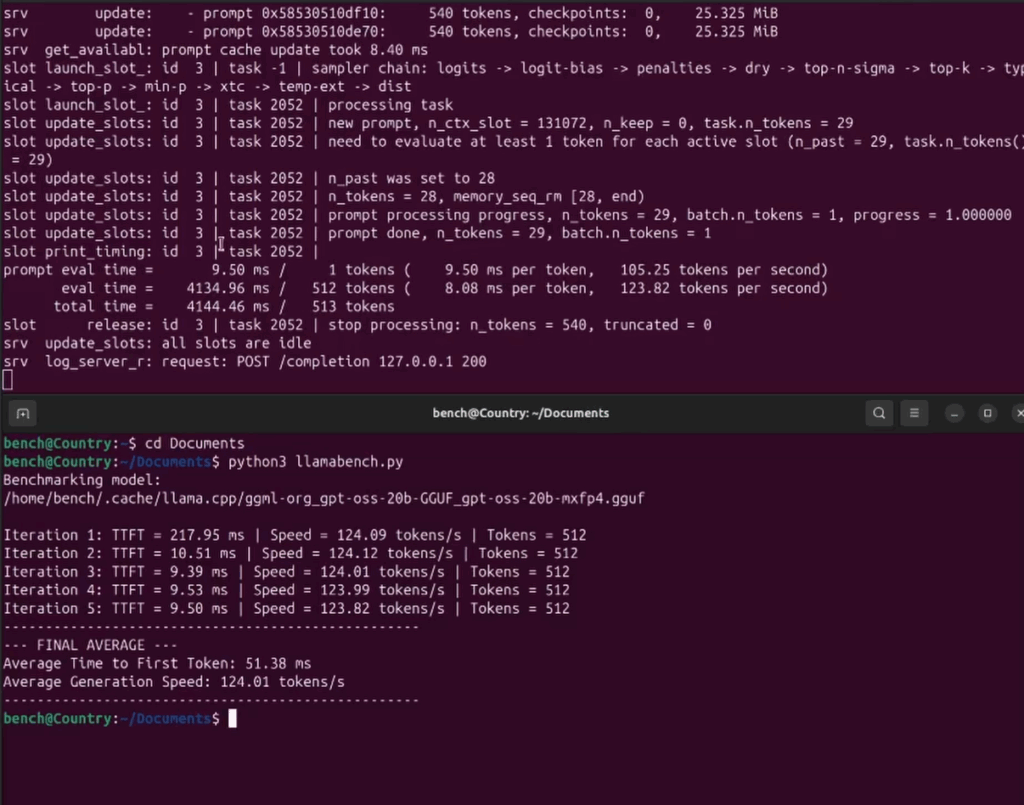
Enjoy some tremendous speeds!!! As shown below:
gpt-oss:20b
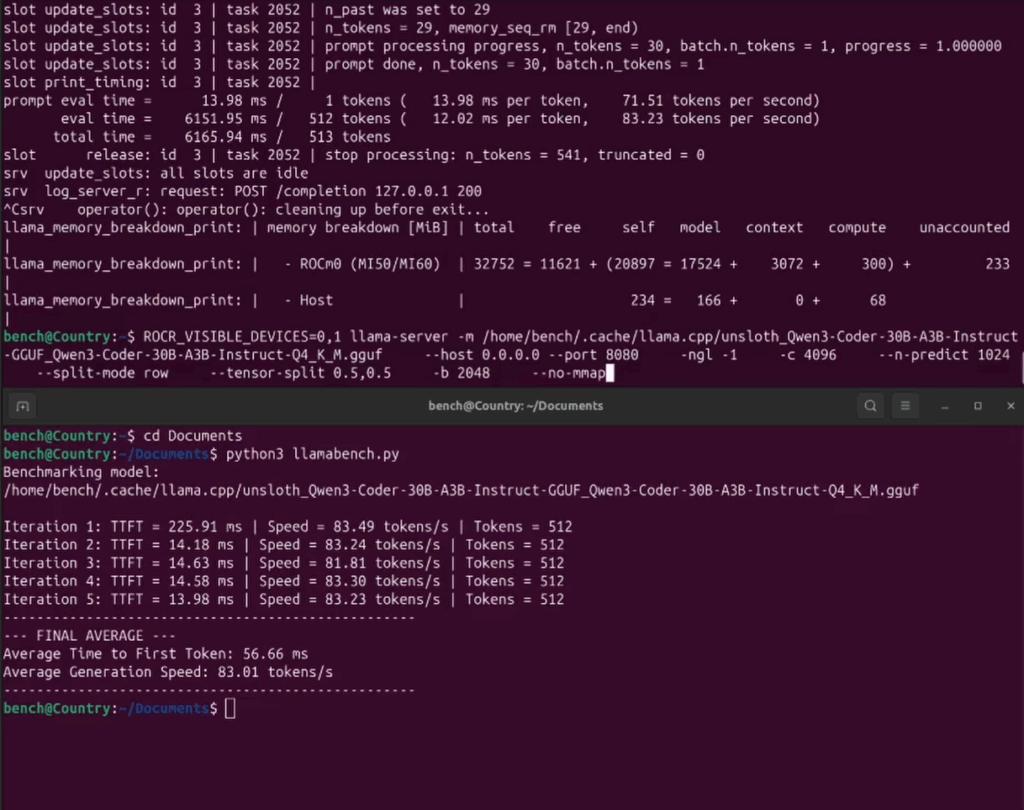
qwen3:30b
Next stage of our project: Image / Video Generation!!! (PyTorch, Stable Diffusion, ComfyUI.
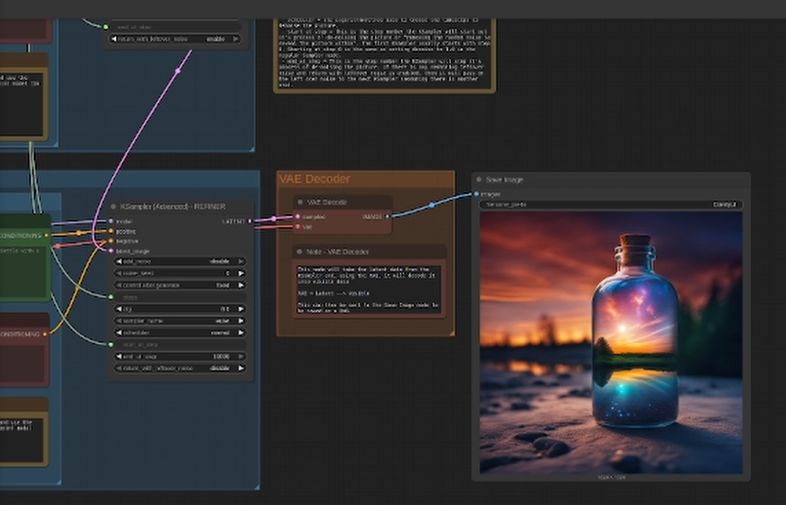
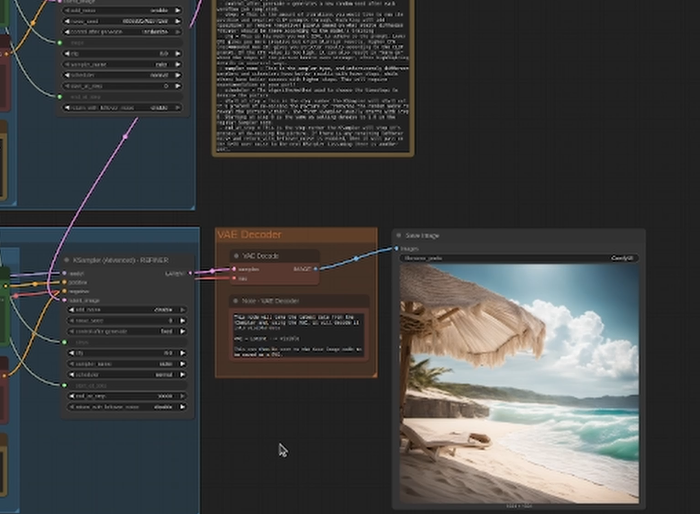
Stage 2 – PyTorch – Stable Diffusion – ComfyUI (Image generation) (under construction!!!)
With our ROCm 7.1.x installed and running llama.cpp correctly, we can now move on to the next phase of the project, using our Mi50’s (gfx906) for image generation.
After many days of jumping through hoops with dependencies and running consumer gfx906 (Radeon) + data center (Mi50) gpus, I opted to, in the end, just pull a docker image that was compiled for this setup.
I used this site to pull my docker image:
https://github.com/mixa3607/ML-gfx906
You’ll have to install docker first. That’s easy:
sudo apt-get update
sudo apt-get install ca-certificates curl gnupg lsb-release
sudo mkdir -p /etc/apt/keyrings
curl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo gpg –dearmor -o /etc/apt/keyrings/docker.gpg
echo \
“deb [arch=$(dpkg –print-architecture) signed-by=/etc/apt/keyrings/docker.gpg] \
https://download.docker.com/linux/ubuntu \
$(lsb_release -cs) stable” | sudo tee /etc/apt/sources.list.d/docker.list > /dev/null
sudo apt-get update
sudo apt-get install docker-ce docker-ce-cli containerd.io
sudo docker run hello-world
And here is my script to sync a local directory to the docker image and launch the ComfyUI app:
docker run –rm -it \
–name comfyui \
–device=/dev/kfd \
–device=/dev/dri \
–group-add video \
-e HSA_VISIBLE_DEVICES=0,1,2 \
-e ROCM_VISIBLE_DEVICES=0,1,2 \
-p 8188:8188 \
-v “$HOME/comfyui/models”:/comfyui/models \
-v “$HOME/comfyui/input”:/comfyui/input \
-v “$HOME/comfyui/output”:/comfyui/output \
-v “$HOME/comfyui/custom_nodes”:/comfyui/custom_nodes \
-v “$HOME/comfyui/user”:/comfyui/user \
mixa3607/comfyui-gfx906:v0.3.69-rocm-6.3.3-20251118163804 \
bash -c “cd /comfyui && python3 main.py –listen 0.0.0.0 –port 8188”
As you are likely aware, running a docker image comes with some restrictions… as the dependencies are “baked into” the image. There are ways to install necessary requirements besides the fact. But it works at it’s basic level. “ComfyUI Manager” for example, will not run for me as gitpython doesn’t seem to be in the container.
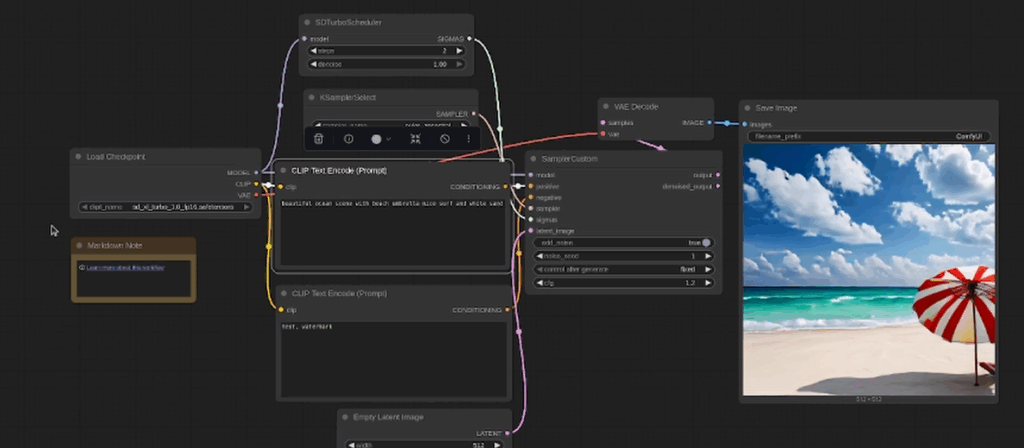
Here are some screen shots of the SD Turbo model:
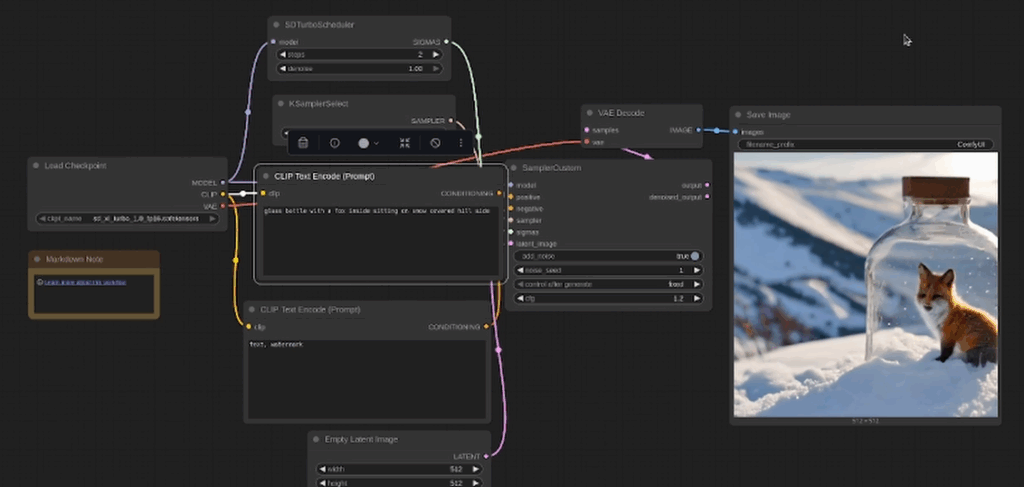
And here are a few examples of the Stable Diffusion Simple model:
Unfortunately, I couldn’t get the SVD (Stable Diffusion Video) model to work with my Mi50 / Radeon 7 combo. I got the HIP error each time. I’ll keep working on it… or please leave me some tips below or reach out directly via email to “david@countryboycomputersbg.com”
Leave a Reply
You must be logged in to post a comment.